
Force control turns machining robots into universal tools
Peter Fixell, Tomas Groth, Mats Isaksson, Hui Zhang, Jianjun Wang, Jianmin He, Martin Kohlmaier, Rainer Krappinger, Jingguo Ge
ABB has written a new chapter in the book of robot applications.
 While in the past it had been a tedious and time-consuming effort to program a robot for delicate fine-tuning operations, robots can now learn how to best manage such tasks themselves. This innovative approach can reduce overall programming times by up to 80 percent for robots used to grind castings, vastly improving productivity levels.
While in the past it had been a tedious and time-consuming effort to program a robot for delicate fine-tuning operations, robots can now learn how to best manage such tasks themselves. This innovative approach can reduce overall programming times by up to 80 percent for robots used to grind castings, vastly improving productivity levels.
With ABB’s new Flex Finishing system featuring RobotWare Machining FC (force control), one of the last real barriers to productivity improvement in this sector has been lifted.
Achieving fast robot movement while assuring contact stability with the workpiece has long been a challenging task for robot application engineers. ABB pioneered this area several years ago, developing robots that could carry out delicate assembly tasks in the automotive industry.
This progress was made possible by using sensors to measure the contact force, and feedback loops to control the force and couple it to the movement of the robot arm. With these force-controlled robots operating on the basis of the S4Cplus robot controller, the assembly time for power trains could be reduced by as much as 75 percent.
A further step in the use of force-controlled robots has recently been made in a more complex class of application: grinding, deburring and polishing of units produced in, for example, a foundry. Unlike part assembly, the control of the process forces in these applications is much more demanding and so far has not been possible. There are several reasons for the higher complexity: The tools wear, the parts have different dimensions and the fixtures are not 100 percent accurate and repeatable, with the risks of large position deviations and inconsistent results.
Traditionally the finishing process has been very labor intensive, and the quality of the finished product has been inconsistent with casts ground, deburred and polished by hand. Until now, robots used for this task were position-controlled with compliant tools and fixtures, moving according to defined trajectories and speeds, sometimes supported by an extra servo drive to adjust for the differences in dimensions. In this mode of operation, if the robot cannot reach the trajectory because the part is not correctly located, it still will try to cut through the part. As a result, the robot stops, the tool breaks or the workpiece gets damaged. To limit such damage, conventional cast-cleaning robots typically run at a slower pace with limited productivity. Due to the need for position control, these robots must be programmed to meet high path accuracy, a very time-consuming effort for an engineer. All these disadvantages – high programming effort, extra tooling, additional servo motors and the considerable risk of damage – were slowing the spread of robot applications in this industry.
Five steps to a major innovation
The new, unique robot application, which ABB launched in 2007, combines five innovative elements:
- Use of the latest ABB robot controller, IRC5, with its high-speed sensor interface
|
|

IRC5 is built on the industry’s most advanced operating system for controlling robots and peripheral equipment. Featuring RAPID language and ABB’s Motion Technology and Communication, RobotWare OS is the most powerful controller operating system available today. IRC5 has two Ethernet channels – one for LAN and one for local connection – as well as two serial channels for point-to-point communication with sensors. The bandwidth provided by the IRC5 controller is critical for the overall performance and reaction time of the robot in correcting and adjusting its position. To realize the correct sampling rate to adjust the dynamic robot positioning, the sensor must be highly integrated with the controller electronics for the success of the innovative application.
IRC5, equipped with ABB’s Motion Technology MultiMove, is a world benchmark, allowing the control of as many as four robots (36 axes) at a time . Common work objects can be shared among robots, enabling complex coordinated patterns. MultiMove also facilitates a dynamic switch between independent and coordinated motion. This unique performance makes it possible to address the complex tasks of grinding, deburring and polishing. The programming environment that supports the user of this innovative application is the first ever to offer this new dimension of programming.
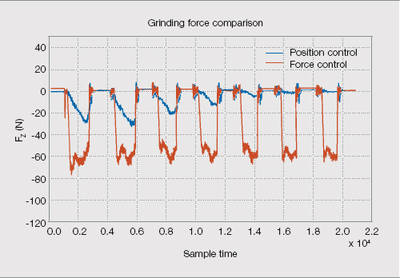 Measured contact force when grinding a turbine blade in seven sequential sweeps; the blue curve shows results with traditional position control, and the red curve shows the consistency achieved with Force Control
Measured contact force when grinding a turbine blade in seven sequential sweeps; the blue curve shows results with traditional position control, and the red curve shows the consistency achieved with Force Control 
It allows simple and efficient programming by using the force sensor itself to define the trajectory for the robot movement. The programming is managed from the FlexPendant and from a dedicated application module for creating the program for Force Control Machining. The concept gives the operator the ability to move the robot by hand and teach it the rough path. Afterwards, the robot will automatically use the rough information to follow the part; at the same time, it will automatically record the exact path and generate a robot program.
The feedback loop, FC Pressure, lets robots grind, polish or buff castings while maintaining a constant pressure between the tool and the work surface. FC Pressure software is aimed at processes demanding a high-quality surface finish. It allows the robot to effectively “feel” its surroundings and follow the casting surface, changing its position to apply a constant pressure on the surface, even if the exact position of the surface is unknown. As there is consistent contact, debris such as a burr is removed to the same depth.
The result is improved surface finish, the ability to handle variations in castings, a minimum risk of damage to the casting surface and predictable tool wear. Since pressure is obtained by moving the robot path, this function is especially suited for polishing, grinding and cleaning, where a surface must be even and smooth.
|
|

The second software feature, FC SpeedChange, enables a robot to deburr or deflash casting surfaces at a consistent speed, slowing down when encountering excessive burr. In processes where path accuracy is important and where the finished result must comply with specific dimensions, FC SpeedChange is the right choice. With FC SpeedChange, the robot is position-controlled and follows a programmed path that maintains a constant material removal rate. It operates at the maximum process speed, automatically slowing down the robot when the machining forces are too high to minimize changed dimensions due to deflections of the robot arm, and to avoid subsequent damage to the part or tool due to stress and heat. As in the case of FC Pressure, this results in shorter cycle times, the ability to handle variations in castings, a minimum risk of damage to the castings and predictable tool wear.
The final product comprises advanced sensor signal processing, mathematics, logic solution and a graphical user inter face for quick, easy and accurate programming, in which the sensor is used to let the operator guide the robot by hand for intuitive hands-on programming. The “plug-and-operate” product offer contains all the parts needed, with the sensor, electronics and cabling mounted and tested on the robot, leaving only the process adaptation to the integrator or customer.
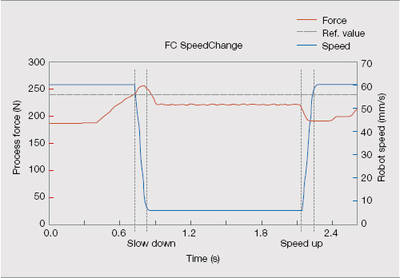 Grinding process where the robot slows down when encountering excessive burr. The measured process force exceeds the set reference value, which triggers the robot to slow down. When the force is decreased, the robot will accelerate to the programmed speed in 0.1 s
Grinding process where the robot slows down when encountering excessive burr. The measured process force exceeds the set reference value, which triggers the robot to slow down. When the force is decreased, the robot will accelerate to the programmed speed in 0.1 s
A concerted action for success
As is the case with most major innovations, developing this system was a collaborative effort. The work of many university and ABB researchers, ABB engineers and customers had to come together to complete this complex, multi-disciplined task.
|
|

ABB and Lund Technical University took the first steps together to define and implement the basic sensor and control functions. From this perspective, it became necessary to gain a better understanding of the application and to find the optimum user interface. The clear path to success was to involve the global resources of ABB – the Force Control concept and implementation from Sweden and the United States, application knowledge from Austria and the graphical user interface from China, as well as real test cases provided by industrial partners. The Rimrock Corporation’s John Kuhn, who performed the real-time tests, said, “The Force Control product has the potential to impact our business more than any past ABB product release to date.” The Rimrock Corperation is a premier supplier of automation products and integration services for North America and a long-time, valued partner of ABB.
A strong market pull
When RobotWare Machining FC was first presented to the public at the GIFA, the world’s largest foundry fair in Düsseldorf, the customer resonance was overwhelming. Customers clearly realized the improved product quality and significant cost savings in engineering time, which can be as much as 80 percent now. Moreover, the cycle time of the robot in operation is reduced by about 20 percent with the enhanced control, and the lifetime of the grinding tools also can be extended by 20 percent.
After the successful launch of Force Control technology for assembly and machining applications, ABB is making an impact in new areas. One such area is the aerospace industry where accurate, reliable and efficient robot drilling is required for flexible production. Now, with RobotWare Machining FC, product finishing operations in foundries are much simpler, enabling finished castings to be produced better, faster and cheaper.
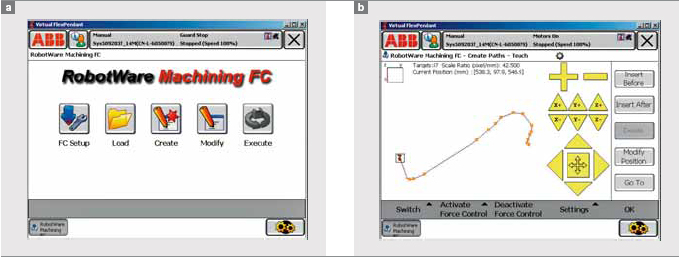
The graphical user interface as seen on the FlexPendant. The path is presented in a 3D view for easy graphical overview and editing
Catalogue of Suppliers: <link _top>ABB Robotics

{kind=link}